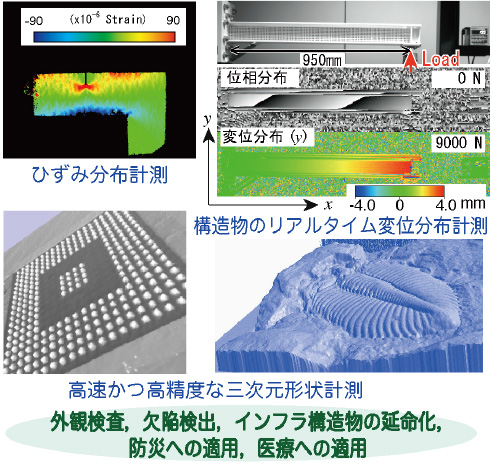
トップ光計測システム研究室では,光や画像を利用して,これからのロボットのセンシング技術の研究開発をしています.新しい手法を生み出し,他とは違う光計測システムを提案しています. 計測手法として,3次元形状計測や構造物の変位・ひずみ分布計測を世界一高速化,高精度化することに取り組んでいます。さらにそれを知的で使いやすい計測システムや検査ロボットなどへ応用して,実用化することを進めています.研究成果は,ロボティクス分野を含め,実験力学分野,非破壊検査分野,インフラセンシング分野,土木分野,FA分野,航空宇宙分野,医療服飾分野,など広く社会に展開しています. 主な研究テーマ:これからのロボットの新しい画像センシング技術の開発・高速かつ高精度な三次元形状計測 →製品検査,人体計測,3Dプリンタ入力装置,障害物検知ロボットなど →カメラのズームやピント調整があとからできる新しい3次元計測手法を考案 ・大型構造物の微小な変位の計測 →インフラ構造物の点検,防災など ・レーザー干渉を利用した微小変位分布計測・ひずみ分布計測 →構造物の欠陥検出など ・これらを使いやすいシステムにする研究 研究内容の詳細はこちらをご覧ください. 最近のトピックス:・サンプリングモアレ法などの位相解析手法をインフラ計測に適用するための規格ができました.(NDIS 4403:2021 格子の位相解析による変位測定方法.日本非破壊検査協会).・格子投影の新しい手法を考案しました.投影パターンの輝度が倍増してサイズも小さくできます.
|
|||